
Sujeción
Pinza robótica – ¿Qué considerar para escoger la más apropiada?

Jul
Aunque muchas veces pasen desapercibidas, las pinzas robóticas son importantes en la implementación exitosa de un sistema de automatización. Al escoger la pinza robótica correcta puedes optimizar el desempeño, reducir los paros y tomar en cuenta la seguridad del operador. 
En manufactura, la diferencia entre éxito y fracaso en ocasiones se mide por la confiabilidad de la sujeción de la pinza robótica. Los ingenieros en ocasiones no le dan la importancia a la pinza robótica al diseñar sus sistemas de automatización. Existen muchos estilos de pinzas de sujeción. Para tomar una buena decisión es importante que no nos dejemos llevar por lo más cómodo, conocido o tratar de generalizar. Hay que considerar varios aspectos al escoger la pinza robótica. Entre ellos los efectos provocados por polvo, grano, aceite, soluble, variaciones de temperatura, limpieza y nivel de interacción con el sistema completo de automatización. Conoce el entorno de la operación 95% de las pinzas robóticas son neumáticas. Este ha sido el estándar por muchos años y seguirá siendo en el futuro próximo. La pinza robótica neumática se utiliza básicamente en 3 tareas. La RST es para sujetar el producto mientras se transfiere a algún punto, por ejemnplo a una banda transportadora, estación de trabajo, máquina, etc. Tan sencillo como mover una frasco de aspirinas de una banda transportadora a una caja. La segunda tarea es la orientación de la parte para que quede en la posición correcta para el siguiente proceso, cómo sería invertir una caja de aspirinas para que se le coloque correctamente la etiqueta. La tercera es sujetar la parte mientras que se realiza un trabajo como sería una pinza robótica que sujeta la caja de aspirinas mientras se sella o se coloca la etiqueta. Aunque parezca sencillo, es importante tomar en cuenta los dos tipos de entorno que requieren mayor atención:
- Contaminado: En este tipo de entorno, es importante mantener los contaminantes fuera de la pinza robótica para que siga funcionando sin problema durante su vida útil. También se puede afectar el funcionamiento de la pinza cuando se combinan altos niveles de polvo, aceite y grasa con variaciones de temperatura (principalmente temperatura alta). Estos entornos son comunes en la industria automotriz, de fundición, de maquinado y aplicaciones industriales generales.En muchos modelos existen puertos de purga. Estos puertos en la pinza robótica, tienen ductos para mantenerla libre de contaminantes. En ocasiones se requerirán tuberías de ceite para prevenir fallas en enteornos con mucha grasa o para dosificar grasa nueva a la pinza.
- Limpio: En este entorne, el enfoque está en que la pinza robótica no suelte contaminantes al ambiente de trabajo. Esto es común en la industrias médica, farmacéutica, electrónica y de producción de alimentos. Algunas pinzas robóticas están certificadas para Cuartos Limpios.Aunque estés trabajando en un entorno limpio o contaminado, las barreras pueden ser efectivas para aumentar la confiabilidad de las pinzas. Estas pueden desplazar los contaminantes en entornos sucios, o mantener la grasa en la pinza en cuartos limpios. Se pueden usar láminas, sellos flexibles de hule y otros. Estos pueden venir como una opción estándar de la pinza o se pueden agregar como parte de la integración al sistema automatizado.
Para disminuir la corrosión, se puede recubrir la pinza con acero inoxidable, platinado de níquel o anodizado. Estos materiales puede ayudar a evitar oxidación o bacterias en ambientes de cuarto limpio. Pueden utilizarse grasas de alta temperatura, grado alimenticio o resistentes al agua, para mejorar el entorno y reducir fallas de funcionalidad. También existen sellos neumáticos diseñados para temperaturas extremas o para manejo de granulado. Buna-N o tirilo se considera como estándar para estas aplicaciones. Para altas temperaturas: Vitron o algunos silicones. 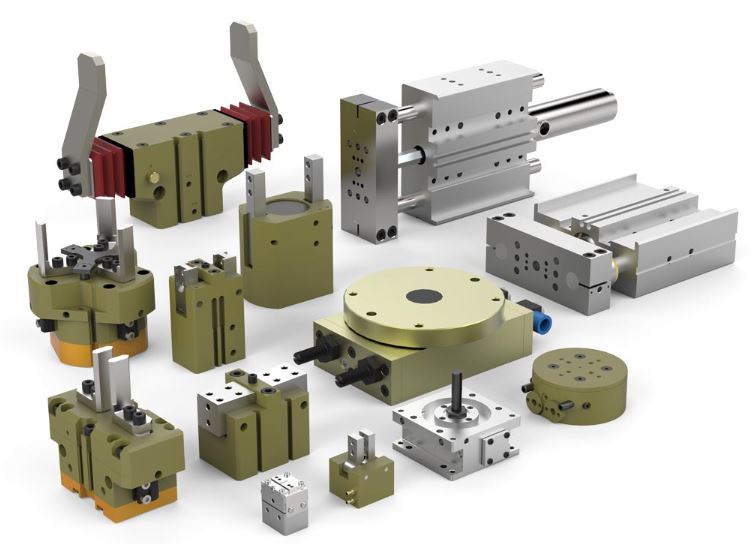
¿Qué barreras y protecciones requiere la pinza robótica?
Aunque estés operando en un área limpia o sucia, las barreras pueden guiar los desechos a que se alejen de las pinzas. Estas barreras también pueden prevenir que las grasas u otros contaminantes se salgan de la pinza y lleguen a ensuciar áreas limpias. Las barreras pueden ser de diversos estilos y materiales. Pueden ser cubiertas de lámina, botas flexibles, fuelles y escobillas de limpieza. Estos protectores pueden venir estándar junto con la pinza robótica, opcionales o pedidos a la medida. Es importante tomar en cuenta la orientación de la pinza robótica a la hora de considerar las barreras. Esto nos ayudará a minimizar el contacto de los contaminantes en superficies y huecos.
Especificaciones clave de la pinza robótica
Una vez que se tomó en cuenta el contexto del trabajo de la pinza robótica, ahora se puede revisar el diseño y la construcción requerida. La pinza robótica tiene 3 partes: el cuerpo (incluyendo la transmisión), las mordazas, los dedos. Generalmente el fabricante de la pinza robótica diseña y fabrica el cuerpo y las mordazas – a lo que se refiere el modo de accionamiento. El fabricante de la máquina surte los dedos para agarrar o encapsular la parte. Se debe de incluir la longitud apropiada del dedo, tomando en cuenta que una longitud excedida puede causar que se amarre la pinza robótica. Cuando se considere la fuerza, demasiada, puede dañar la parte, y muy poca, causa problemas de seguridad por partes que se pueden caer. La carrera también es importante. Si está excedida puede desperdiciar tiempo de operación, y si es my corta puede dificultar la sujeción correcta de la parte. Los tiempo de cierre puede impactar varios puntos del proceso. Al seleccionar la pinza robótica, es más importante la repetibilidad que la precisión. Sobre todo en proceso de tomar objetos pequeñoso cuando una parte de alta precisión se esá colocando dentro de otra para ensamblarla. Revisar las especificaciones de precisión que tiene la maquinaria para asegurar de no estar fuera de los límites de tolerancia.

Traducido de artículo de Destaco https://www.destaco.com/resources/how-to-buy-guides/questions-to-ask-before-selecting-your-air-gripper.html
En cuanto al diseño de los dedos y los métodos de la mordaza hay que considerar, se puede realizar de la siguiente manera:
- Fricción: Este es el método de sujeción más común, con superficies de contacto de los dedos que se cierran y detienen en la pieza a sujetar. A través de la fuerza de fricción se sostiene la pieza. Si se pierde la presión de aire, la pieza se caerá. Se deben de evitar los dedos por fricción si se sujetan piezas lubricadas o que tienen aceite. Se requieren fuerzas de sujeción altas cuando se utiliza este método de fricción y se debe de tomar en cuenta la superficie de los dedos. Se pueden agregar mangas de carburo para aumentar la superficie que va a sujetar aunque esto podría dañar si se trabaja con piezas frágiles. Para piezas frágiles, se pueden utilizar protectores de uretano que incrementarán la fricción sin dañar la parte.
- Acunado: Los dedos tienen la figura de la parte (ejemplo: cilindro con dedos de media luna). Los dedos se cierran con fuerza a la figura de la parte a sujetar. Si se pierde presión de aire se puede caer la pieza,.
- Encapsulada: Este se considera el método más seguro de sujeción. Los dedos tienen la misma forma de la parte. En este método los dedos no se tienen que cerrar completamente ya que la parte quedará encapsulada. Si se pierde la presión, la parte no se caerá al menos de que exista una fuerza externa.
Conclusión
Es importante que los ingenieros y diseñadores evalúen las alternativas al seleccionar la pinza robótica. El desempeño de un sistema automatizado va a ser tan bueno como su eslabón más débil. Para asegurarse que el eslabón más débil no es la pinza robótica, es importante tomar en cuenta el contexto del trabajo, y la utilización de la pinza robótica adecuada dadas las alternativas incluso algunas que serían soluciones a la medida.
Traducido de artículo de Destaco https://www.destaco.com/resources/how-to-buy-guides/questions-to-ask-before-selecting-your-air-gripper.html