
Industria
Cómo automatizar mi proceso de lijado-pulido
Jul
Cómo automatizar mi proceso de lijado-pulido
Puede tener muchas razones para querer automatizar su proceso:
* Incrementar la producción – Normalmente puede incrementarla de 2 a 5 veces, esto se vuelve aún más crítico cuando el cuello de botella de su proceso de producción está en el lijado-pulido.
* Asegurar la calidad – Puede lograr acabados de manera rutinaria en sus piezas una vez que automatiza su proceso. Tendrá ahorros significativos en mermas, re-trabajos y devoluciones de sus clientes.
* Escasez o falta de personal – Ya no le afectarán las faltas, rotación y escasez del personal en su proceso de producción. Al automatizar el trabajo del operador se simplifica, brindándole mayor calidad del ambiente de trabajo.
* Ahorro en personal – Este también es una de las razones aunque las 3 anteriores suelen ser más impactantes en los resultados de rentabilidad de su proceso.
Si una o varias de estas cuatro situaciones las tiene en su empresa y desea explorar la posibilidad de automatizar su proceso de lijado-pulido, lo que sigue es determinar qué capacidad requiere del robot, el método de sujeción de partes, cuántos cabezales va a utilizar y el método de alimentación de piezas a su sistema.
Piezas pequeñas
Las piezas pequeñas las estará sujetando en su robot. Muchas veces es posible que el robot tenga un porta piezas que le permite sujetar muchas piezas a la vez. A continuación un ejemplo de un robot sujetando 4 manijas a la vez para pulirlas:


También se pueden utilizar charolas de alimentación que contengan muchas piezas. Se programa el robot para ir recogiendo de manera secuencial estas piezas y dejándolas de la misma manera en la siguiente charola de piezas terminadas:
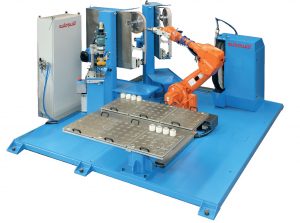

Piezas medianas
Las piezas medianas son piezas de hasta 200 kilogramos de peso que aún puede sujetar el robot por sí mismo. Además existen restricciones de dimensión ya que piezas con una dimensión mayor a 1500 mm pueden limitar la movilidad del robot y no ser aptas para trabajarse como piezas medianas.
A continuación le mostramos un par de ejemplos de este tipo de piezas en robots:


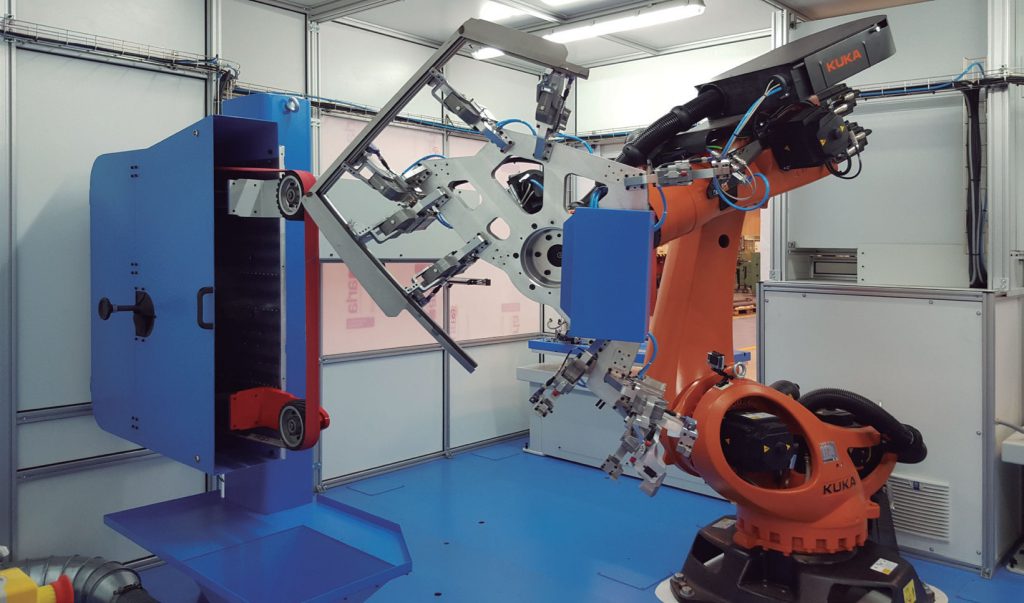
Piezas grandes
Estas son piezas que por su dimensión y/o peso no es posible sujetarlas con el robot. En estos casos la pieza se coloca en una mesa indexada que puede girar. En el robot se coloca el cabezal de lija de banda u otro herramental que se quiere usar para dar el acabado. A continuación un ejemplo:

Existen varios otros factores a tomar en cuenta a la hora de diseñar su sistema de automatización de pulido y lijado. Si desea más información al respecto puede contactarnos a [email protected]